The Robohand has been getting an amazing amount of press in recent months. I have previously blogged on the topic Previous Prosthetic post with basic information. Since then, there has been a Kansas City Star article on the topic.
As I previously mentioned, I had the opportunity to work with senior engineering students at Washington University, Biomedical Engineering 401. Together with Lindley Wall (my congenital hand partner) and Valerie Calhoun (occupational/ hand therapist at Shriners Hospital), I met with three students: Kendall Gretsch, Henry Lather, Kranti Peddada.
 |
| Biomedical Engineering Students |
We met on several occasions to discuss prosthetics in general, challenges with the Robohand, and other issues. They brought their engineering expertise and we shared our practical experience with prosthetics and the needs of children. It was a valuable experience as Kendall, Henry, and Kranti had no prosthetic experience and were able to think about the issues in a very different way. Needless to say, three smart undergraduate students can solve a lot of problems.
This was a “design”, rather than a “build” class but they were able to design AND build a basic prototype of a motorized Robohand prosthetic. It was judged a success as they won the design competition and received an A+ in the class. But, they are not done and are planning to fit one of the new prostheses for one or two patients, moving forward.
There are 2 key design differences compared to the Robohand: the motor and the working thumb. This prosthetic is battery powered and controlled with an accelerometer (like in the iPhone). The thumb moves with a slightly different trigger (compared to finger motion). Importantly, the total cost is still inexpensive, less than $150.
 |
| Motorized, 3-D printed prosthetic hand |
 |
| Motorized, 3-D printed prosthetic hand, side view. |
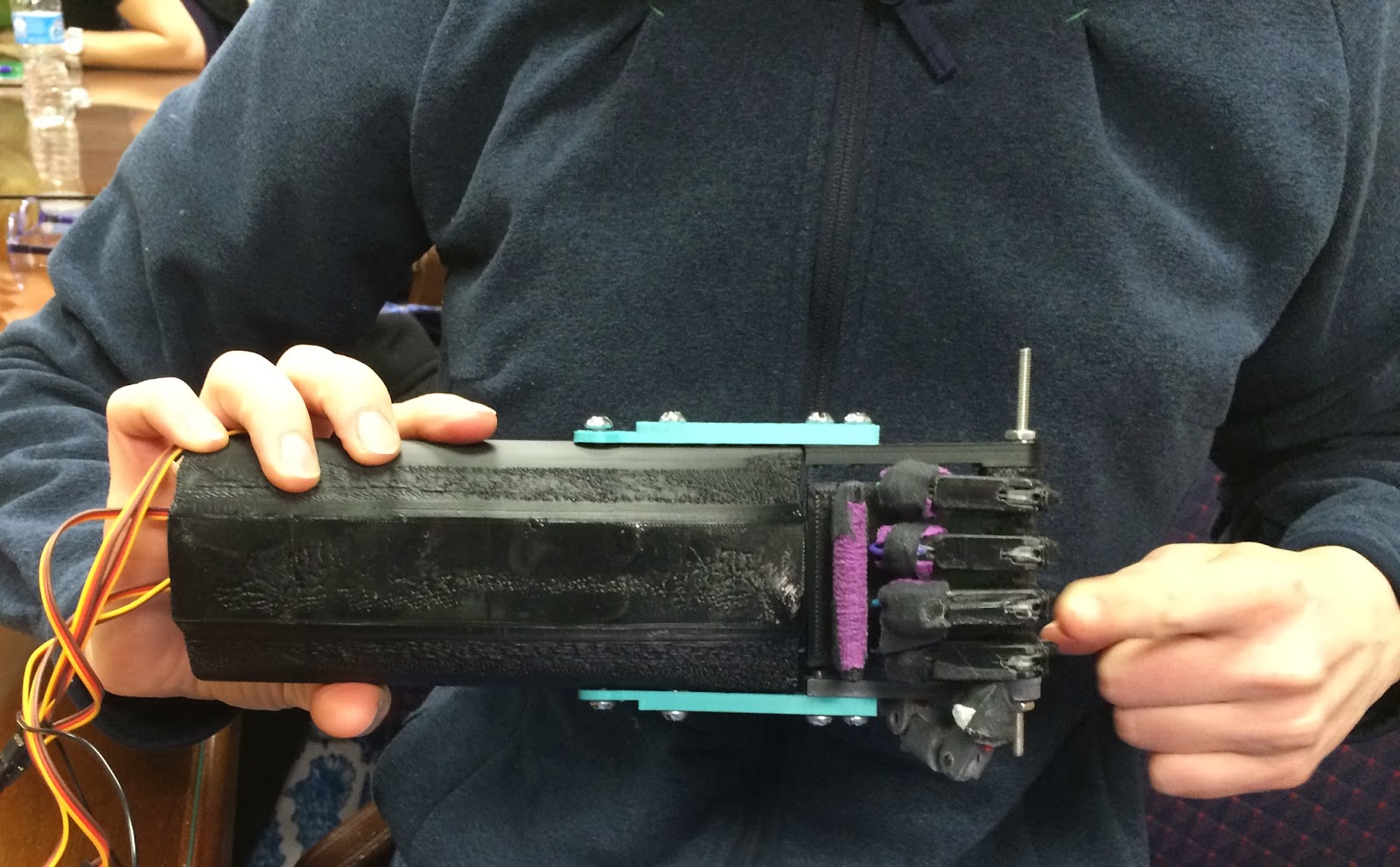 |
| Motorized, 3-D printed prosthetic hand, fingers. |
 |
| Motorized, 3-D printed prosthetic hand, one more view. |
Amazing, right? However the still pictures above simply do not do it justice. Here are 2 videos to better show its potential. Watch how the shoulder- motion up/ down- powers the finger motion and then shoulder motion- front/ back- powers thumb motion. Currently, it has been set to require a good deal of motion to power the prosthetic but that can be easily changed. When the prosthetic is fit for the particular patient, the specific controls and sensitivity of the controls will be altered for each child!